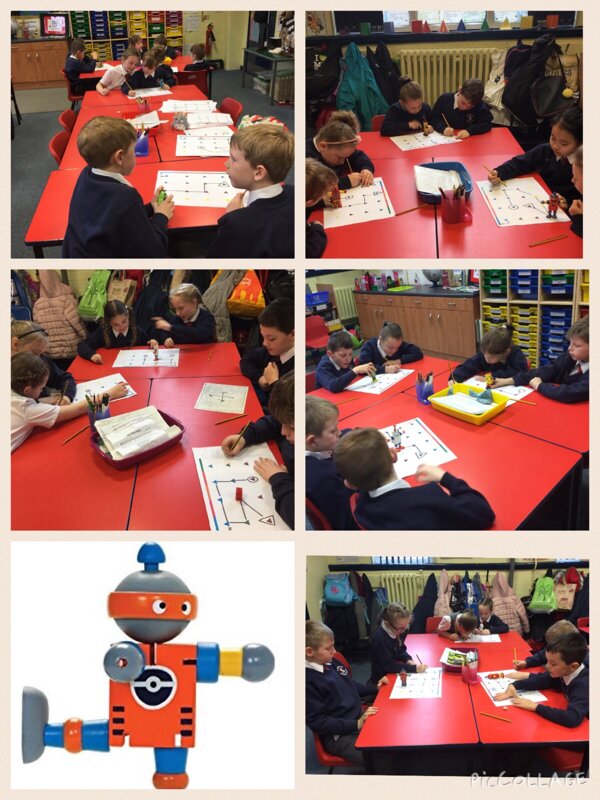
29 March 2017 Sarah Kinsey Year 3 Blog We are using our knowledge about right angles, degrees and turns to describe a robots journey.
.png)